
文章来源: 光伏电站
,在实际运行中,为实现电动机与发动机之间的快速切换,要求系统有较短的响应时间;为了能够更好的保证汽车运行的稳定性,要求系统具有精确的电流定位;同时,为了能够更好的保证系统控制的可靠与准确,对系统采样精度与控制速度的要求也较高。研究
在实际工作中,混合电动汽车工作环境复杂、各种干扰因素的影响较大,给研究其能量流状态带来了较大的困难。能否在实验室对动力电池的工作性能进行模拟与仿真呢?这样,不但可以节省大量的人力物力,而且对于混合电动汽车的设计和总成有很好的参照作用。
本文将介绍的混合电动汽车就是针对上述要求而设计的,该系统可仿真混合电动汽车的实际在做的工作环境,为研究混合电动汽车控制策略提供了一个灵活、简便、高效的平台。
总系统采用组合式平台搭建,根据仿真工作的要求,按照工作电流的大小组合使用对应的仿真模块来构成整个系统的能量控制部分。采用这种结构设计可以大幅度减小总系统的体积与功耗。
系统中集成了CAN2.0B和RS-232C接口,可以与汽车内的各种控制仪表进行通信与数据交换,与汽车总控系统的标准通信接口兼容,能够方便的移植到实际的混合电动汽车系统中。同时,可以直接与计算机通信,由计算机来控制管理系统的运行,便于实现监控与仿真。
混合电动汽车能量流仿真系统主要由充电系统、放电系统和控制系统三个部分所组成。系统结构框图如图1所示。
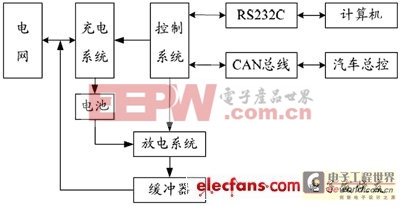
在充电系统中,采用高效率的脉宽调制方式(PWM),同时采用反馈稳定控制管理系统,使得充电过程快速稳定。
在放电系统中,采用节能型的能量回馈方式,将电能返回电网或者仍然回到充电系统,达到节能降耗的目的。
在控制系统中,采用高速嵌入式微处理器,具有抗干扰能力强、响应速度快、控制方式灵活的特点。
首先将电网电压进行整流,经过脉冲宽度调制,再经过隔离变压器变换,接着进行整流稳压,即可得到所需的工作电压。为了能够更好的保证充电过程的快速稳定,将电压、电流采样值引入稳定控制管理系统,使得充电过程快速稳定。充电系统结构如图2所示。

电池的放电系统采用能量回馈方式。首先将动力电池的电能进行变换,送入中间缓冲器,然后通过逆变方式将电能变换为三相交流,这部分能量既能够适用于返回电网,又可以将它再次送入充电系统,实现电能的重复利用,同时可有实际效果的减少电流波动对电网的影响。放电系统结构如图3所示。

本系统采用基于高速嵌入式微处理器的控制管理系统。高速处理器能确保快速完成动力电池的充放电任务,并且通过数字滤波算法使系统具备比较好的抗干扰的能力。高精度的A/D、D/A控制单元使得充放电过程动态稳定,满足控制要求。转换状态用中断方式通知CPU读取转换结果,保证系统的快速响应。监控计算机通过接口函数就能控制系统的运行,并能采集实时参数进行数据的分析、处理与监控。控制管理系统结构如图4所示。
Copyright © www.jiayuanle.com/ 开云全站-云开全站appkaiyun登录-kaiyun中国登录入口登录 网站地图

扫一扫,关注我们
